Uitklapbare microsensor geeft robotchirurgen 'gevoel'

Origami en pop-up-boeken inspireerden wetenschappers tot nieuwe fabricagemethodes voor kleinere medische microsensoren.
De chirurg zit tegenwoordig steeds vaker achter een beeldscherm om een scalpel via een robotarm te bedienen. Dat levert minder fouten en infecties op, maar de robotarmen overtreffen de finesse van het gevoel in de vingers van een chirurg nog niet.
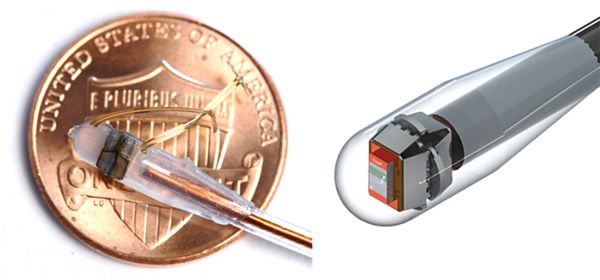
Amerikaanse wetenschappers ontwikkelden daarom een speciale fabricagemethode om betaalbare druksensoren op een piepkleine schaal te produceren. De wetenschappers lieten zich daarbij inspireren door origami en pop-up-boeken. De sensor bestaat uit vier laser gesneden opgevouwen laagjes van verschillende materialen die als een sandwich op elkaar geplakt zijn.
Een bad van ultrasound
Deze 2D-structuur van laagjes ontvouwt zich tot een 3D-electromagnetische doosvormige sensor via een geïntegreerde veer zodra het in een bad van ultrasound geluid wordt gedompeld. Deze zelfassemblerende fabricagemethode drukt de kosten en maakt veel complexere micromachines als nu mogelijk is met de huidige fabricage methodes. Hoewel deze 2D-fabricagemethode verschilt van '4D-printen', deelt het wel het concept van zelfassemblage, waarbij een 2D-object uitvouwt tot een 3D-object.
Virtuele vingertoppen
De huidige druksensor werkt met licht om druk te meten en is 2,7 mm klein. Dat is klein genoeg om in een huidige endoscoop gebruikt te worden. De wetenschappers willen de sensoren echter nog verder verkleinen om in de toekomst flexibele, chirurgische robotarmen te maken die uitgerust zijn met minuscule 'vingertoppen' die de robot gevoel moeten geven.