©ZhenshanBing
De eerste robotmuis met ruggengraat: 'Dit maakt robots veel beter en sneller'

Bij robots denk je misschien eerder aan een grote robot met een menselijke vorm. Deze robot is aan de kleine kant, maar maakt het goed met zijn ruggengraat.
Hoewel we in het verleden andere robotdieren voorbij hebben zien komen, zoals honden en zelfs cheeta's van het bekende bedrijf Boston Dynamics, heeft deze nieuwe robotmuis iets wat die andere high-tech beesten niet hebben: een ruggengraat.
Blijkbaar is dit deel van het lichaam niet zo gemakkelijk na te bootsen met technologie en daarom wordt het onderdeel dan ook doorgaans geschuwd door robotmakers. In het geval van deze robotische muis hebben de makers deze complexiteit juist omarmd. Bekijk hier een filmpje:
Biologische voorsprong
De reden daarvoor is niet omdat het er gewoon cooler uitziet. Bij dieren in de natuur komt hun beweging, flexibiliteit en motoriek bijna volledig voort uit de wervelkolom. Het nabootsen van zo'n complex systeem van gestapelde wervels is veel moeilijker dan alleen de benen nabouwen, maar als het lukt om zulke kunstmatige ruggengraten toch te ontwikkelen, dan kan dit leiden tot een nog nauwkeurigere wendbaarheid voor robots.
Met oren en al
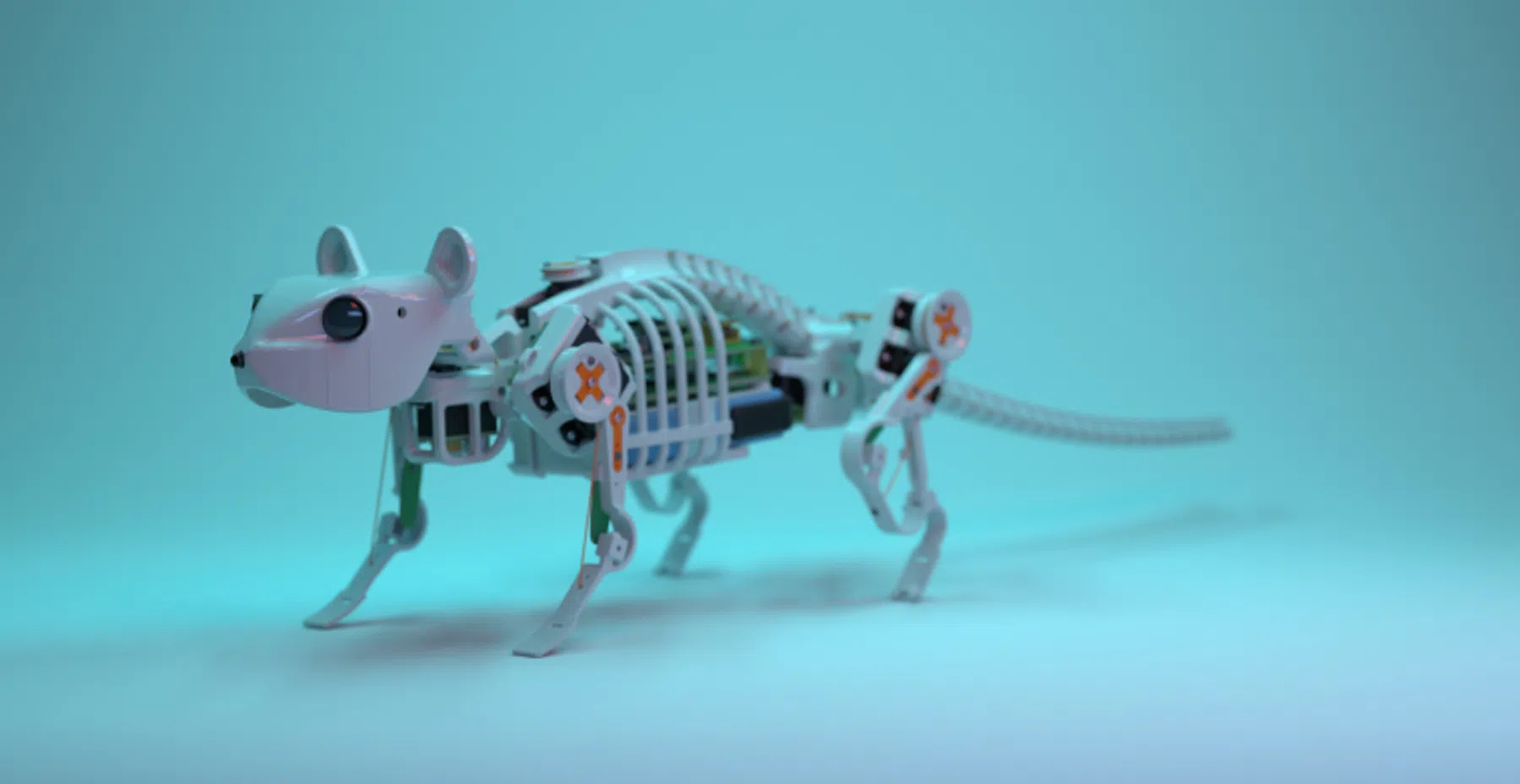
In een publicatie in Science Robotics hebben wetenschappers uit Duitsland en China de robotmuis met de naam NeRmo onthuld. Het is een biomimetische viervoetige robot die zich moet kunnen verplaatsen dankzij motorische pezen, die door de wervelkolom en de elleboog- en kniegewrichten lopen. Hoewel de oren er slechts zijn voor de sier, moet de rest wel degelijk het skelet van een muis nabootsen.
Het voorste deel bevat alle elektronica, terwijl het achterste deel daadwerkelijk fungeert als wervelkolom, met vier gewrichten. De voordelen zijn vooral zichtbaar wanneer het beestje zich draait of versnelt.
Robottraining
De muis moest hiervoor eerst een aantal opdrachten doorlopen: zo moest het balanceren, rechtlijnig lopen, behendig draaien en door een doolhof kruipen. Dit deden ze met en zonder de wervelkolom. Wat bleek? NeRmo voerde deze opdrachten beter, sneller en nauwkeuriger uit met zijn wervelkolom.
De muis scoorde trouwens pas echt goed in het doolhof: daar was deze namelijk gemiddeld 30 procent sneller dan toen hij zonder welvelkolom liep.
Vooruitgang
Ondanks dat het slechts een eerste versie is, zijn de onderzoekers ervan overtuigd dat de ontwikkelingen in de toekomst zullen versnellen. Ze hebben er in ieder geval vertrouwen in dat het toepassen van een kunstmatige wervelkolom zomaar eens een kantelpunt (letterlijk) kan zijn in de verbetering van robots.
Meest recent Nieuws














25 juli 2024








